Sortir Bahan Bangunan Otomatis Berbasis Conveyor
.jpg)
.jpg)

.jpg)









11. Kabel USB









20.Karton

21.Double Tape





1. PWM (Pulse Width Modulation)
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).
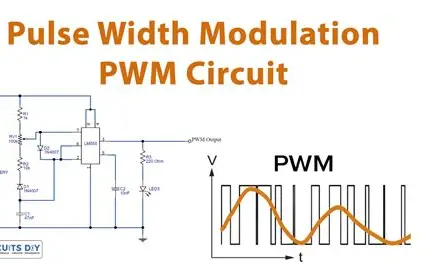
· Duty Cycle = tON / ttotal
· tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
· tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
· ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
2. ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu fitur penting dalam sistem mikrokontroler yang berfungsi sebagai penghubung antara sinyal analog dan pemrosesan digital. Fitur ini memungkinkan Raspberry Pi Pico untuk membaca sinyal analog, kemudian mengubahnya menjadi data digital agar dapat diproses oleh sistem.
Fungsi utama ADC adalah mengubah tegangan analog menjadi nilai digital, sehingga data dari sensor seperti potensiometer, sensor suhu, atau cahaya bisa digunakan oleh mikrokontroler.
3. Mikrokontroler
Raspberry Pi Pico adalah board mikrokontroler berbasis chip RP2040 buatan Raspberry Pi Foundation (lihat datasheet RP2040). Board ini memiliki 26 pin input/output digital multifungsi, di mana beberapa pin dapat digunakan sebagai PWM output, serta 3 kanal input analog (ADC), osilator internal 12 MHz yang dikalikan dengan PLL untuk mencapai frekuensi kerja hingga 133 MHz, koneksi Micro-USB, pin VSYS untuk catu daya, header SWD (Serial Wire Debug) untuk pemrograman dan debugging, serta tombol BOOTSEL yang berfungsi untuk memasukkan board ke mode pemrograman.
Untuk menggunakan mikrokontroler ini, cukup hubungkan Raspberry Pi Pico ke komputer menggunakan kabel Micro-USB. Setelah itu, board dapat diprogram menggunakan MicroPython atau C/C++ SDK. Pico juga dapat dijalankan menggunakan catu daya eksternal melalui pin VSYS yang mendukung tegangan 1.8V hingga 5.5V, misalnya dari adaptor DC atau baterai. Raspberry Pi Pico akan otomatis menjalankan program yang telah diunggah saat dinyalakan.
Setiap 14 pin digital pada arduino uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Fungsi – fungsi tersebut beroperasi di tegangan 5 volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm.
4. Komunikasi
4.1. Universal Asynchronous Receiver Transmitter (UART)
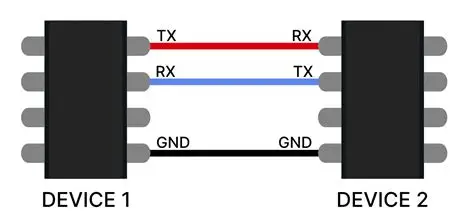
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.

Cara Kerja Komunikasi UART :
UART (Universal Asynchronous Receiver/Transmitter) adalah metode komunikasi serial asinkron yang mengirim data bit demi bit tanpa sinyal clock bersama.
-
Komunikasi terjadi antara dua perangkat dengan menghubungkan:
-
TX (Transmit) satu perangkat ke RX (Receive) perangkat lain.
-
-
Data dikirim dalam frame yang terdiri dari:
-
Start bit (LOW) → menandai awal data
-
Data bit (5–8 bit, biasanya 8 bit)
-
(Optional) Parity bit → deteksi error ringan
-
Stop bit (HIGH) → menandai akhir data
-
-
Kedua perangkat harus menggunakan baud rate yang sama agar bit-bit terbaca dengan benar.
-
Penerima akan membaca data sesuai waktu bit berdasarkan baud rate dan menyusun ulang byte aslinya.
4. Listing Program [Kembali]



7. Vidio [Kembali]
Saat benda terdeteksi oleh sensor IR, Raspberry Pi Pico (sebagai slave) membaca data dari sensor metal. Jika benda adalah logam, motor servo akan aktif untuk menyortir benda tersebut ke jalur logam, sedangkan jika bukan logam, benda akan terus berjalan di jalur utama. Pico slave juga mengirimkan data status benda ke Pico master melalui komunikasi UART. Pico master kemudian menampilkan informasi tersebut pada LCD 16x2 dan mengontrol pergerakan motor konveyor menggunakan driver motor L298N. Sistem ini juga dilengkapi dengan modul load cell untuk menimbang berat benda sebagai fitur tambahan.


Tidak ada komentar:
Posting Komentar